Hun Chan Lee

About Me
Research Interests
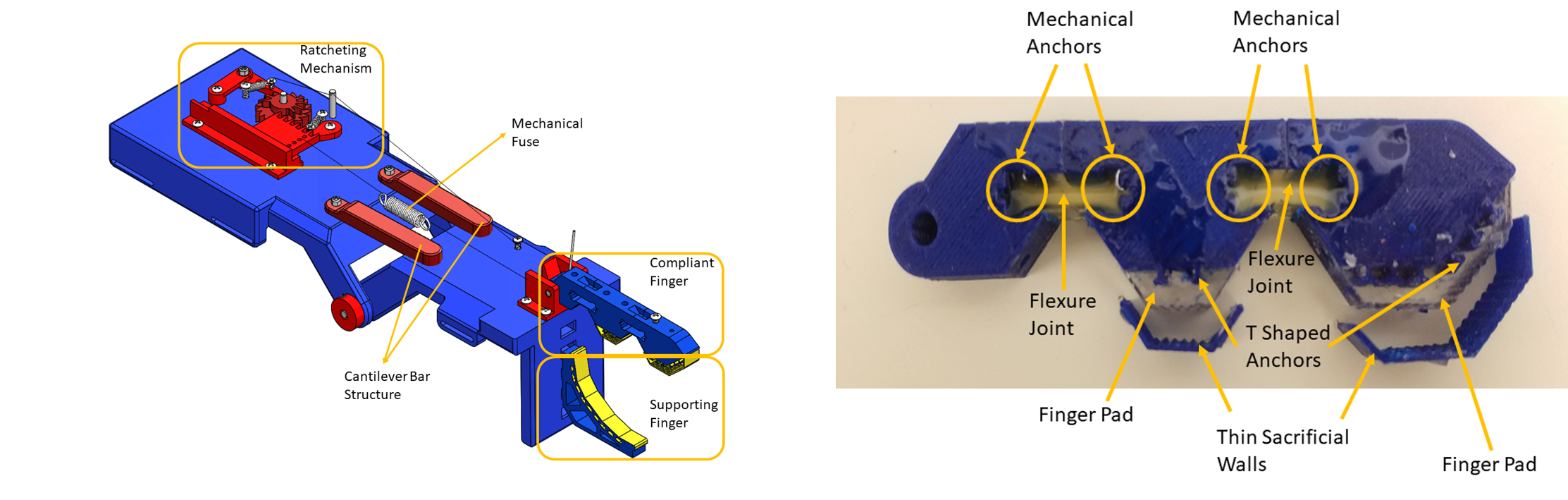
Soft-Rigid Hybrid Robots
Applied Skills : 3D Modeling (Solidworks), Programming (Python, MATLAB), Circuit Design (Altium), Fabrication (laser microprocessing, layer-by-layer fabrication, plasma etching)
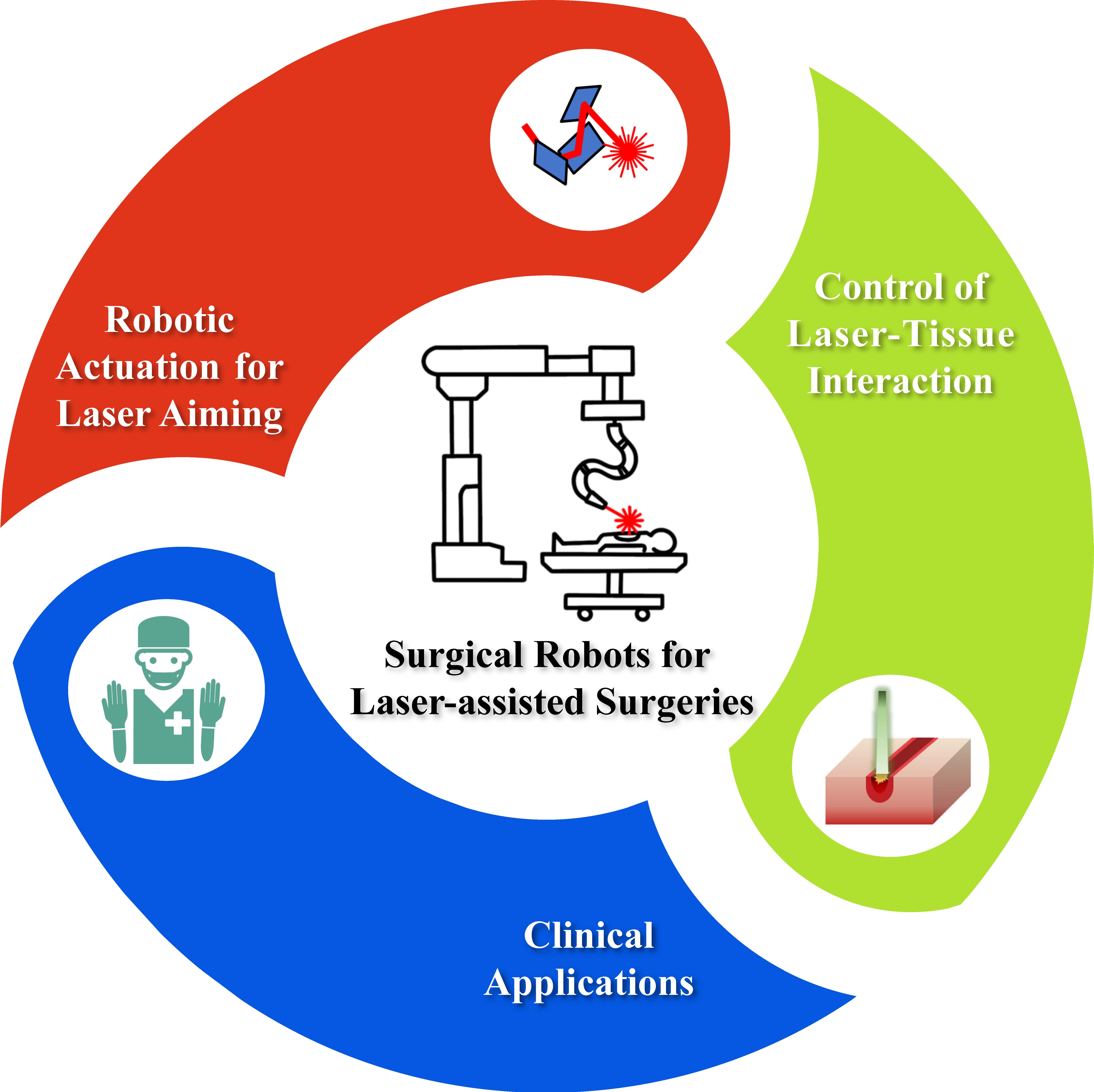
Laser-assisted Surgery Robots
Applied Skills : 3D Modeling (Solidworks), Programming (Python, MATLAB, ROS2), Machine Learning (PyTorch), Fabrication (laser microprocessing, layer-by-layer fabrication, plasma etching)
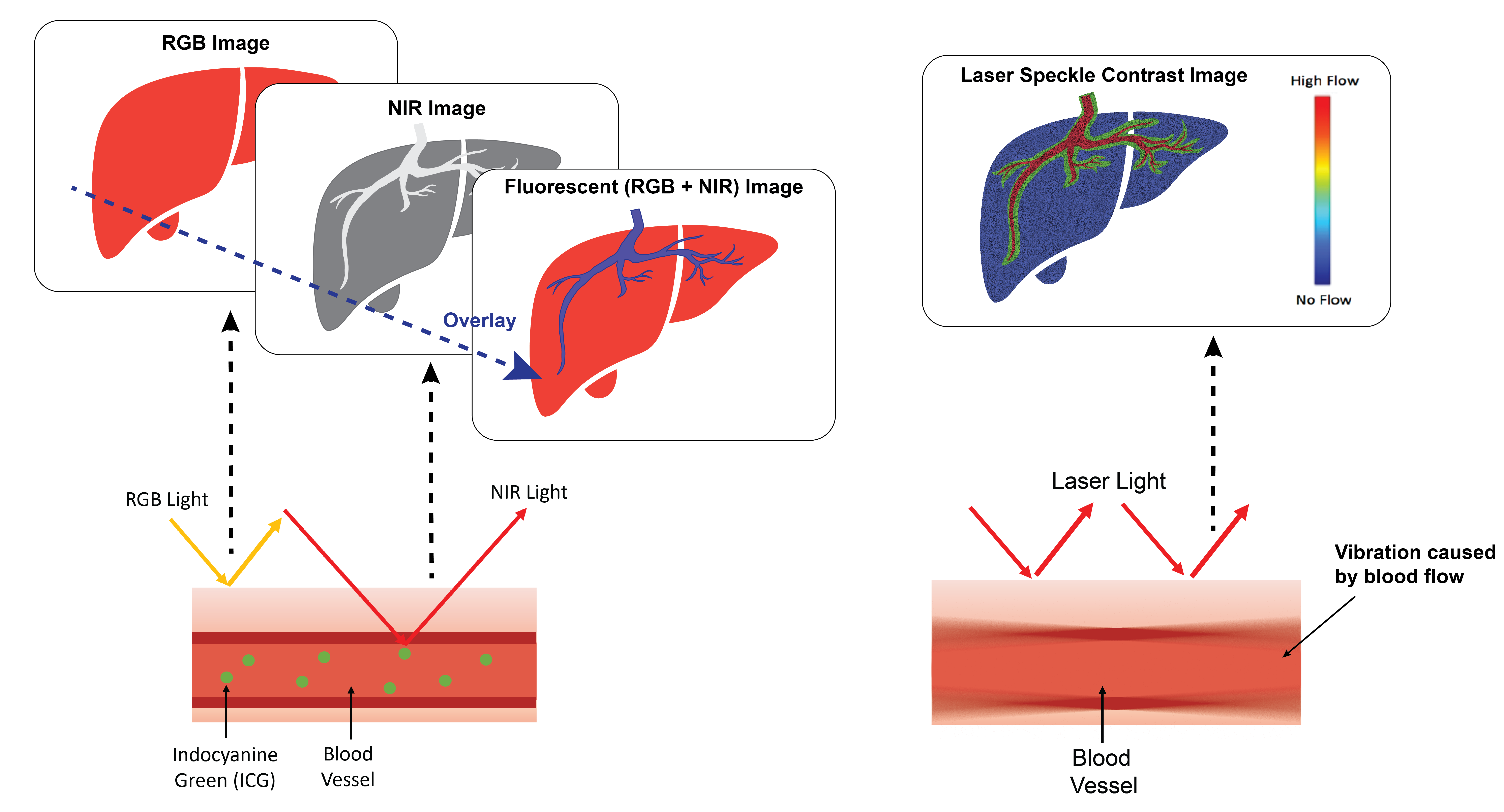
Surgical Vision
Applied Skills : 3D Modeling (Solidworks), Programming (Python, OpenCV), Machine Learning (PyTorch - YOLO v5), Fabrication (3D printing)
3D Printed Prostethic Hand
Applied Skills : 3D Modeling (Solidworks), Programming (MATLAB), Fabrication (3D printing, Molding)
Selected Publications
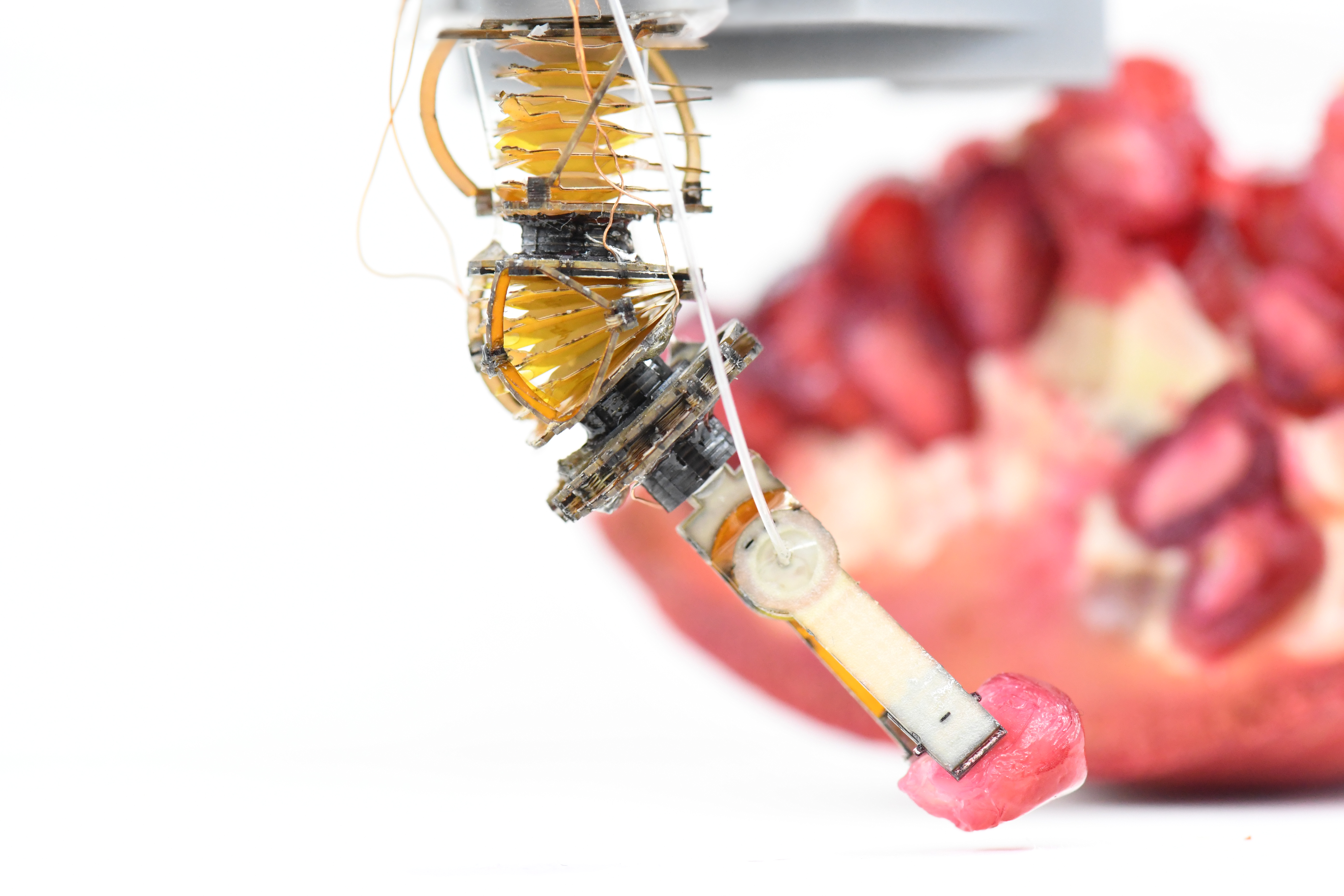
A fabrication strategy for millimeter-scale, self-sensing soft-rigid hybrid robots
Hun Chan Lee, Nash Elder, Matthew Leal, Sarah Stantial, Elenis Vergara Martinez, Sneha Jos, Hyunje Cho, Sheila Russo
Nature Communications, 2024 | [Paper] | [Cover Art] | [Behind the Paper]
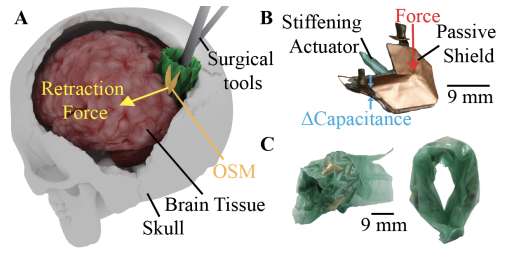
Capacitive Origami Sensing Modules for Measuring Force in a Neurosurgical, Soft Robotic Retractor
Daniel Van Lewen, Catherine Wang, Hun Chan Lee, Anand Devaiah, Urvashi Upadhyay, Sheila Russo
ICRA, 2024 | [Paper]
When the End Effector Is a Laser: A Review of Robotics in Laser Surgery
Hun Chan Lee, Nicholas Pacheco, Loris Fichera, Sheila Russo
Advanced Intelligent Systems, 2022 | [Paper]
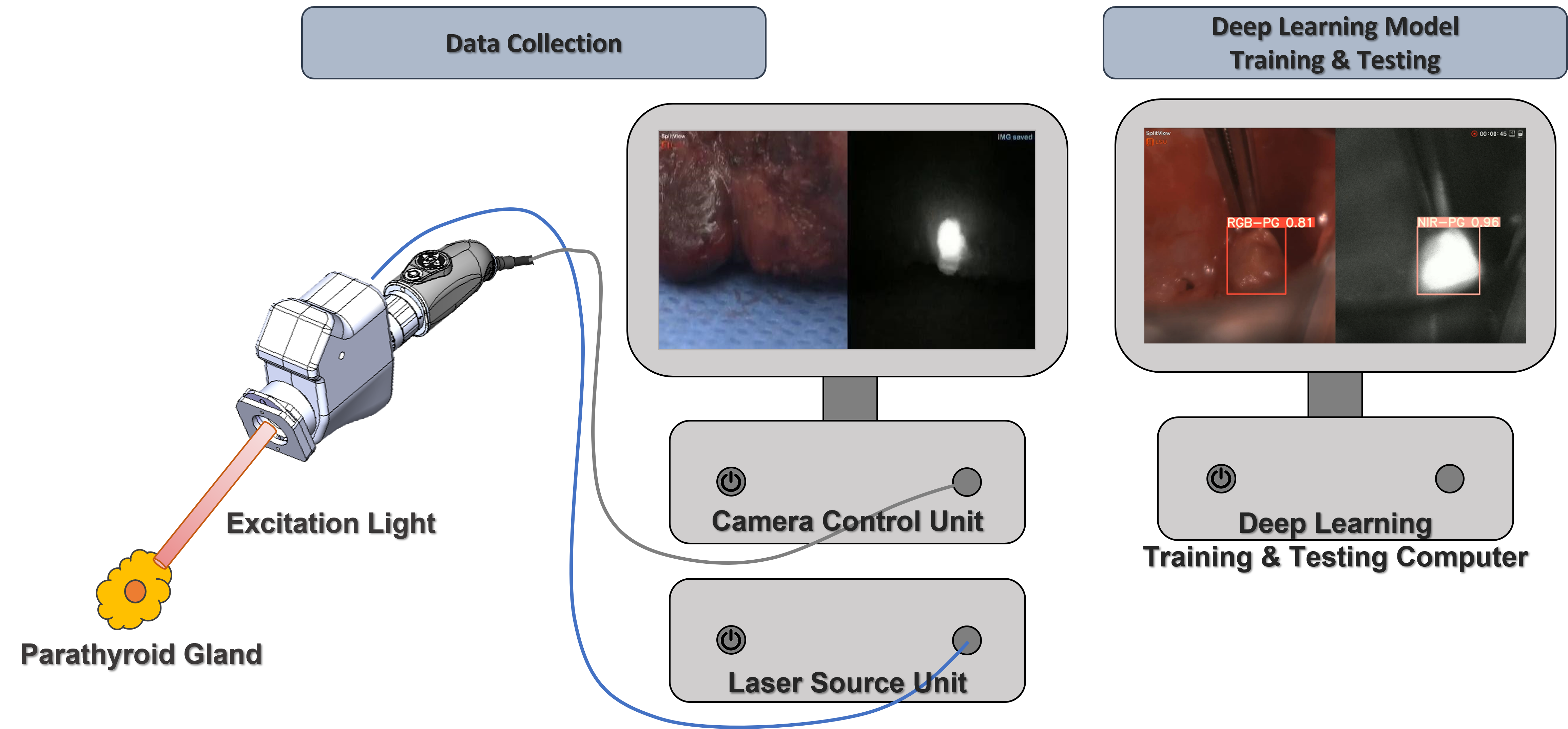
A coaxial excitation, dual-red-green-blue/near-infrared paired imaging system toward computer-aided detection of parathyroid glands in situ and ex vivo
Yoseph Kim*, Hun Chan Lee*, Jongchan Kim*, Eugene Oh, Jennifer Yoo, Bo Ning, Seung Yup Lee, Khalid Mohamed Ali, Ralph Tufano, Jonathon Russell, Jaepyeong Cha (*equally contributed)
Journal of Biophotonics, 2022 | [Paper]
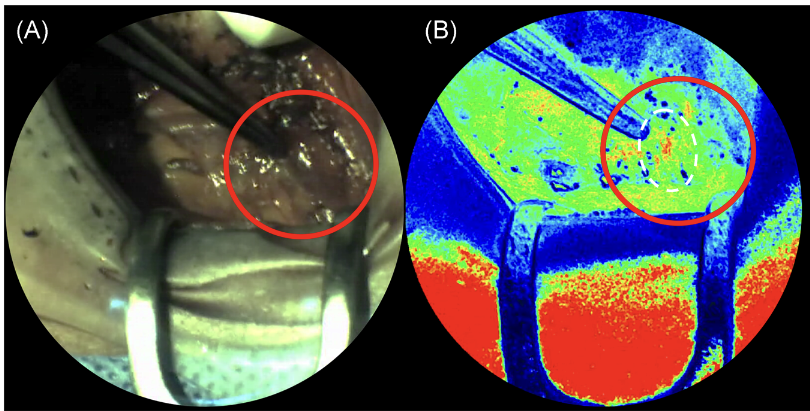
A pilot feasibility study to assess vascularity and perfusion of parathyroid glands using a portable hand‐held imager
Eugene Oh, Hun Chan Lee, Yoseph Kim, Bo Ning, Seung Yup Lee, Jaepyeong Cha, Wan Wook Kim
Lasers in Surgery and Medicine, 2021 | [Paper]
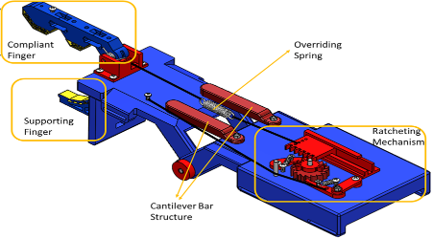
Design of a Novel Locking Ratcheting Mechanism for a Body-Powered Underactuated Hand
Hun Chan Lee, Raymond Cipra
Journal of Medical Devices, 2020 | [Paper]
Honors and Awards
• Distinguished Mechanical Engineering Fellowship (2021)
• Dean’s List & Semester Honor (2012-2016)
• EPICS AMD Design Award (2014)
• School of Mechanical Engineering Scholarship (2013)